As chaves para o sucesso da visão de um carro autônomo é a diversidade - diferentes tipos de sensores - e a redundância - sensores sobrepostos, que podem verificar se a detecção do sistema é precisa.
Os três principais sensores de veículos autônomos são a câmera, o radar e o sensor LIDAR. Trabalhando juntos, eles fornecem os recursos visuais do carro e de seu entorno, e ajudam a detectar a velocidade e a distância dos objetos próximos, bem como a sua forma tridimensional. Além disso, sensores conhecidos como unidades de medição inerciais ajudam a rastrear a aceleração e localização do carro autônomo.
Para entender como esses sensores funcionam em um carro autônomo - e substituir para melhorar a visão de direção humana - vamos começar ampliando o sensor mais comumente usado, a câmera.
Câmeras
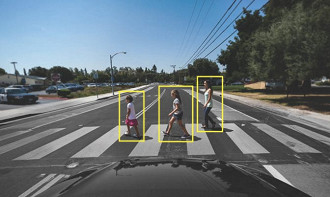
De fotos a vídeos, as câmeras são a maneira mais precisa de criar uma representação visual do mundo, e isso também é verdade para os carros autônomo. Para pilotar corretamente, eles dependem de câmeras inseridas em todos os lados do veículo - frente, traseira, esquerda e direita - para unir uma visão de 360 graus do ambiente.
Uber é aprovado para reinicio de testes com carro autônomo
Alguns carros têm um amplo campo de visão - de até 120 graus - e um alcance menor. Outros se concentram em uma visão mais estreita para fornecer recursos visuais de longo alcance.
Alguns carros até integram câmeras olho de peixe, que contêm lentes super amplas capazes de proporcionar uma visão panorâmica, para dar uma visão completa do que está por trás do veículo e assim permitindo que ele estacione sozinho.
Embora as câmeras forneçam uma visão precisa, elas também têm suas limitações. As câmeras até podem distinguir detalhes do ambiente circundante, mas as distâncias desses objetos precisam ser calculadas para saber exatamente a localização. Também é mais difícil para sensores baseados em câmeras detectar objetos em condições de baixa visibilidade, como neblina, chuva ou no escuro.
Radar
Os sensores de radar podem complementar a visão da câmera em momentos de baixa visibilidade, como dirigir à noite, e melhorar a detecção do automóvel.
Tradicionalmente usado para detectar navios, aeronaves e formações climáticas, o radar funciona transmitindo ondas de rádio em pulsos. Quando essas ondas atingem um objeto, elas retornam ao sensor, fornecendo dados sobre a velocidade e a localização do objeto.
Uber é aprovado para reinicio de testes com carro autônomo
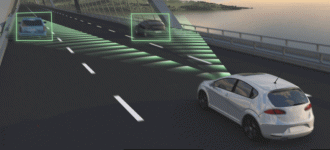
Como as câmeras do veículo, os sensores de radar geralmente cercam o carro para detectar objetos em todos os ângulos. Eles são capazes de determinar a velocidade e a distância, mas não podem distinguir entre diferentes tipos de veículos.
Enquanto os dados fornecidos pelo radar surround e pela câmera são suficientes para níveis mais baixos de autonomia, eles não consegue ter resposta para todas as situações sem um motorista humano. É aí que entra o sensor LIDAR.
LIDAR
A câmera e o radar são sensores comuns: a maioria dos carros modernos já os utiliza para assistência avançada ao motorista, principalmente na hora de estacionar. Eles também podem dar mais autonomia ao veículo com motorista humano.
Mas, para um carro ser completamente capaz de andar sem motorista, o LIDAR - um sensor que mede distâncias por lasers pulsantes - se provou incrivelmente útil.
Nvidia entrega relatório de segurança de carro autônomo
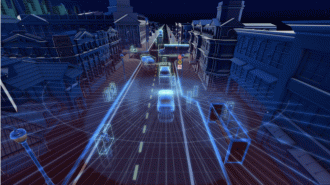
O Lidar possibilita que carros autônomos tenham uma visão 3D do ambiente. Ele dá forma e profundidade aos carros e pedestres ao redor, bem como à geografia da estrada. E funciona muito bem em condições de baixa luminosidade.
Ao emitir lasers invisíveis a velocidades mais rápidas, os sensores de guiamento são capazes de pintar uma imagem 3D mais detalhada, a partir dos sinais que se recuperam instantaneamente. Esses sinais criam "nuvens de pontos", que representam o ambiente ao redor do veículo para aumentar a segurança e a diversidade dos dados dos sensores.
O lado negativo do sensor LIDAR são seus custos, até 10 vezes maior que o custo da câmera e do radar, além de ter um alcance mais limitado.
Conjunto de sensores
Os sensores LIDAR, radar e câmera fornecem dados ricos sobre o ambiente do carro. No entanto, assim como o cérebro humano processa dados visuais captados pelos olhos, um veículo autônomo deve ser capaz de dar sentido a esse fluxo constante de informações.
Carros autônomos fazem isso usando um processo chamado fusão de sensores. As entradas do sensor são alimentadas em um computador de inteligência artificial centralizado de alto desempenho, que combina as partes relevantes de dados para o carro a fim de colaborar na tomada de decisões na direção.
Portanto, em vez de confiar apenas em um tipo de dado de sensor em momentos específicos, a fusão de sensores permite a análise de um conjunto de várias informações - como formato, velocidade e distância - para garantir confiabilidade.
Também fornece redundância. Ao decidir mudar de faixa, o recebimento de dados da câmera e dos sensores de radar antes de mudar de faixa, melhora muito a segurança da manobra, assim como os atuais avisos de ponto cego servem como apoio para os motoristas humanos.
O carro sempre tem uma imagem completa e atualizada do ambiente ao redor. Isso significa que, ao contrário dos motoristas humanos, os veículos autônomos não têm blindspots e estão sempre vigilantes do mundo em movimento e mudança ao seu redor.
